
Super User
Sunday, 03 January 2016 17:02
3-2-1 Décollage
Sur l'aire de lancement qui est le tapis, le robot doit pouvoir transporter, tracter, déplacer une masse de 500g ou plus et la laisser dans une zone de couleur sur surface (zone de traction). Il doit ensuite se déplacer rapidement dans la zone rouge de la surface (zone de tir), afin de lancer son orbiteur (fusée) et atteindre la cible. Plus loin et plus précis est le tir, plus de points sont accumulés.
Published in
2015-Astrobot
Tagged under
Sunday, 03 January 2016 17:00
Assemblage de la tour de lancement
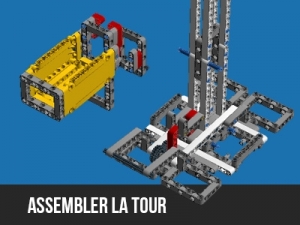
Défi Course à la lune
Instruction à suivre pour assembler la tour de lancement du défi Course à la lune.
Published in
2015-Astrobot
Tagged under
Sunday, 03 January 2016 16:57
L'orbite fatidique

Les participants doivent construire et programmer un robot qui soit en mesure de :
- 1. détecter la ligne blanche (orbite) ceinturant la zone de jeu;
- 2. détecter le robot adverse ;
- 3. pousser ou tirer ce dernier COMPLÈTEMENT à l'extérieur de la zone de jeu circulaire sans en sortir lui-même.
Sunday, 03 January 2016 16:34
Course à la lune

Construire un robot télécommandé qui sera capable de trouver, prendre et transporter des ressources (blocs LEGO) de différentes couleurs au juge. Celui-ci les échangera contre des pièces d’une fusée qui devra être assemblée par les membres de l’équipe. Cette fusée devra par la suite être transportée de façon autonome par le robot et déposée automatiquement sur la surface de lancement située entre la zone de départ et la zone de manipulation. La joute se termine au moment où les rampes de lancement ont été activées ou lorsque le temps réglementaire est écoulé.
Published in
2015-Astrobot
Tagged under
Sunday, 03 January 2016 16:33
Ascenceur spatial

Construire un robot qui, en s’aidant d’un contrepoids, sera capable de se hisser le long du câble (poutre), d’identifier le chargement pour l’ISS (balles bleues) ou les satellites perdus (balles jaunes) ou d’autres objets qu’il faudra redescendre sur terre (balles rouges), de les saisir, puis de continuer son ascension jusqu’à (aux) l’altitude(s) de mise en orbite du (des) chargements.
Published in
2015-Astrobot
Sunday, 03 January 2016 16:30
Nouveaux Horizons

Le robot doit pouvoir pivoter dans le vide afin de détecter une variation de la lumière ambiante (étoile), de détecter et compter le nombre d'objets à proximité (les planètes) et de différencier la taille de ceux-ci.
Published in
2015-Astrobot
Tagged under
Thursday, 10 October 2013 16:14
Robocircus 2014 - Défi Clown Acrobot Junior

Published in
2014-RoboCircus
Tagged under
Thursday, 10 October 2013 16:13
Robocircus 2014 - Défi Jonglobots

Published in
2014-RoboCircus
Tagged under
Thursday, 10 October 2013 16:12
Robocircus 2014 - Défi Des hommes forts - Junior

Published in
2014-RoboCircus
Tagged under
Thursday, 10 October 2013 16:11
Robocircus 2014 - Défi Des canons et des couleurs senior

Published in
2014-RoboCircus
Tagged under